
4月25日,北京车展。元戎启行发起一场别开生面的AI Talk。没有产品宣讲,没有参数对比,而是邀请来自学界、产业界、教育界的多位嘉宾。
本场对话由复旦大学教授、上海创智学院全时导师张力主持,阿里云智能集团 AI 汽车行业解决方案总经理霍健、蚂蚁灵波科技世界模型与具身智能技术负责人徐英豪、童行书院创始人郝景芳以及元戎首席科学家阮翀共同参与。

发布会 AI Talk 环节
他们用半个小时追问同一个命题:物理AI究竟为何而来?这场跨界对话将围绕层层递进的问题展开,直指物理AI当前最真实的裂缝与未来的可能终局。
关键拷问:大模型还有什么能力需要突破
第一个环节,嘉宾们会被问到一个“冒犯”但真诚的问题:当前大模型已经渗透进日常生活的方方面面,但有哪些具体的现象或时刻,让你意识到它的能力还远远不够?
从过往讨论来看,一个高度共识的答案很可能是:自动驾驶和机器人。数字世界里,大模型能写诗、编程、画图;但一旦进入物理世界——需要在地库出口的坡道上判断盲区、在窄路会车时预判对方意图、在突发状况下保障绝对安全——大模型就显得“水土不服”。这恰恰是物理AI必须跨越的裂缝。

元戎启行首席科学家阮翀演讲
随后,话题将转向积极的一面:有哪些突破性进展,可以为大模型能力的提升提供借鉴?从教育领域的常识推理训练,到机器人研究中的物理约束嵌入,再到多模态交互数据的质量优化,不同领域的“灯塔”正在点亮。
路线之争:世界模型与VLA模型谁是终局
圆桌的第二个核心议题,是一场经典的技术路线辩论。当前自动驾驶及物理AI领域,存在两条代表性路径:一是“世界模型”,强调构建能够预测和模拟物理世界的内部表征;二是“视觉-语言-动作大模型(VLA)”,追求从感知到控制端到端的实时决策。
阮翀给出了元戎启行的判断:二者并非非此即彼。世界模型擅长预测和模拟物理世界的演变,适合做“想象与推演”;VLA擅长从感知直达控制,适合做“快速决策”。在自动驾驶这类对实时性和安全性要求极高的场景中,更可行的路径是以VLA为执行主干,以世界模型作为内部模拟器,在关键时刻进行推演验证。
而在圆桌的最后一层追问,跳出了技术本身:我们最终希望AI带来的是一个什么样的世界?是效率至上、高度自动化,但可能拉大数字鸿沟?还是技术普惠、赋能每一个个体?
这场圆桌提出来的问题,或许每个人都有自己的答案,但提出问题本身,已是物理AI走向成熟的重要一步。在一众比拼参数、配置的发布会中,元戎启行选择用一场“提问”来定义自己的品牌气质。这不仅是一家自动驾驶公司,更是一家思考AI终极命题的物理智能探索者。
免责声明:文章来源于广告主,市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。:商机讯 » 元戎启行发起一场“AI for what”跨界对话,追问物理 AI 的奥义与终局
 创业高新·澄就未来——第九届江阴(高新区)创新创业大赛总决赛落幕
创业高新·澄就未来——第九届江阴(高新区)创新创业大赛总决赛落幕
 破局医疗孤岛 数智重构生态——专访海弗医疗宋长远
破局医疗孤岛 数智重构生态——专访海弗医疗宋长远 四十载匠心筑城 兴达与燕郊共绘人居新图
四十载匠心筑城 兴达与燕郊共绘人居新图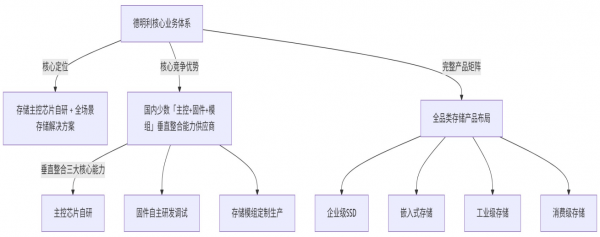 战略协同,纵深布局:构筑‘算存一体’的亚太科技服务平台
战略协同,纵深布局:构筑‘算存一体’的亚太科技服务平台 数智化浪潮下的亚太科技服务平台:行业前景与价值重构
数智化浪潮下的亚太科技服务平台:行业前景与价值重构 德明利:以自研主控为核心,夯实AI时代的存储底座
德明利:以自研主控为核心,夯实AI时代的存储底座 存储控制技术的价值重估:德明利的战略卡位与行业窗口
存储控制技术的价值重估:德明利的战略卡位与行业窗口 GEO效果下滑没人管?GEO服务商监测能力深度解析:可验证、可纠错、可进化
GEO效果下滑没人管?GEO服务商监测能力深度解析:可验证、可纠错、可进化 2026年国内媒体发稿平台怎么选?海外发稿平台怎么选?一篇搞懂全域传播
2026年国内媒体发稿平台怎么选?海外发稿平台怎么选?一篇搞懂全域传播

